W instalacjach kinetycznych ruch nigdy nie jest efektem neutralnym. Jest on podstawowym zachowaniem, dzięki któremu dzieło staje się czytelne w przestrzeni. Dzieło kinetyczne może wydawać się widzowi bezwysiłkowe, ale za tą pozorną łatwością kryje się wysoce specyficzny system ruchu: techniczne ramy, które określają, jak dzieło się porusza, jak precyzyjnie działa, jak się starzeje, jak jest konserwowane i jak przekonująco wspiera koncepcję artystyczną.
Dlatego systemy ruchu mają tak duże znaczenie we współczesnej sztuce kinetycznej. Nie tylko animują rzeźbę po jej ukończeniu. Od samego początku definiują fizyczny język dzieła. Jakość ruchu – czy to spokojnego, czy dramatycznego, ciągłego czy epizodycznego, responsywnego czy z góry określonego – zależy od logiki systemu, który się za nim kryje. W praktyce oznacza to, że system ruchu to nie tylko wybór mechaniczny. To decyzja projektowa, decyzja inżynierska, a często jednocześnie decyzja architektoniczna.
Dla architektów, deweloperów, producentów i zespołów projektowych pracujących z instalacjami kinetycznymi, zrozumienie systemów ruchu oznacza zrozumienie, jak ruch jest faktycznie wytwarzany. Oznacza to uznanie, że różne systemy generują różne efekty przestrzenne, różne obciążenia operacyjne oraz różne ograniczenia dotyczące skali, precyzji, bezpieczeństwa i konserwacji. Zawieszona instalacja w atrium, rzeźba reagująca na wiatr na placu i interaktywny element w holu publicznym mogą należeć do tej samej rodziny sztuki kinetycznej, ale systemy, na których się opierają, mogą się radykalnie różnić.
Dla SKYFORM STUDIO techniczna głębia staje się kluczowa. Wybór systemu ruchu wpływa nie tylko na zachowanie instalacji w dniu otwarcia, ale także na to, czy to zachowanie pozostanie wiarygodne w dłuższej perspektywie. Kształtuje on relację między zamysłem artystycznym a rzeczywistym działaniem. W pracach kinetycznych ruch jest tak silny, jak system, który go umożliwia.


Systemy ruchu są wybierane na podstawie zachowania, a nie tylko mechanizmu
Jednym z najczęstszych nieporozumień w projektowaniu kinetycznym jest założenie, że systemy ruchu można wybierać w sposób ogólny, tak jakby projekt wymagał jedynie „rozwiązania zmotoryzowanego” lub „mechanizmu kinetycznego”. W rzeczywistości system jest wybierany na podstawie zachowania, jakie instalacja musi osiągnąć.
Pierwsze pytanie inżynieryjne nie dotyczy tego, jaki sprzęt zostanie użyty. Chodzi o to, jakiego rodzaju ruchu faktycznie wymaga praca. Czy instalacja wymaga ciągłego ruchu, czy sporadycznej aktywacji? Czy ruch jest zsynchronizowany w wielu komponentach, czy też ograniczony do jednego elementu? Czy powinien być płynny i cichy, widocznie mechaniczny, reagujący na otoczenie, czy też reagujący na obecność i dane? Czy precyzja jest ważniejsza niż amplituda? Czy ruch powinien być naturalny, zaprogramowany, architektoniczny czy performatywny?
Decyzje te determinują system ruchu na długo przed wyborem konkretnych komponentów. Dzieło oparte na subtelnej, kolektywnej fali będzie wymagało innej logiki systemowej niż rzeźba oparta na powolnym obrocie, ruchomym baldachimie lub responsywnym polu wiszącym. Niektóre systemy są odpowiednie dla precyzji i powtarzalności. Inne sprawdzają się lepiej, gdy koncepcja opiera się na zmienności lub pasywnej reakcji środowiska. Dlatego systemów ruchu nie można traktować jako wymiennych pakietów technicznych. Stanowią one część koncepcyjnej podstawy dzieła.
Najmocniejsze instalacje kinetyczne to te, w których system ruchu i zamysł artystyczny są nierozerwalnie ze sobą powiązane. Widz może nigdy nie zobaczyć pełnej technicznej złożoności systemu, ale odczuwa jej konsekwencje w jakości samego ruchu.
Układy napędu bezpośredniego i kontrolowany ruch obrotowy
Systemy z napędem bezpośrednim należą do najczystszych przykładów logiki ruchu w instalacjach kinetycznych. W tych systemach ruch jest przenoszony bezpośrednio z silnika na element ruchomy, bez wielokrotnych przesunięć pośrednich. Pozwala to na uzyskanie płynnego, wysoce kontrolowanego ruchu i jest szczególnie przydatne tam, gdzie w dziele sztuki liczy się precyzja, powtarzalność i stabilna sekwencja.
Napęd bezpośredni często wiąże się z zachowaniem obrotowym: tarcze, pierścienie, panele, łopatki, ramiona i elementy zawieszone obracają się wokół stałej osi lub w ściśle określonym zakresie. Główną zaletą tego podejścia jest przejrzystość. Ponieważ ścieżka systemu jest stosunkowo prosta, ruch można łatwiej skalibrować, a ogólne zachowanie może pozostać bardziej przewidywalne w czasie. W instalacjach, w których liczy się cicha praca i precyzyjna synchronizacja, taka kontrola jest szczególnie cenna.
Jednak napęd bezpośredni nie oznacza automatycznie prostoty. W większych skalach elementy obrotowe generują znaczące konsekwencje strukturalne i mechaniczne. Nawet powolny ruch może powodować obciążenia bezwładnościowe, naprężenia skrętne i długotrwałe zużycie łożysk, wałów i połączeń podporowych. Gdy ruch jest rozłożony na wiele elementów, kalibracja staje się bardziej wymagająca. Im płynniejsza wydaje się instalacja, tym bardziej zdyscyplinowana musi być strategia osiowania i tolerancji.
Ten typ systemu jest szczególnie przydatny we wnętrzach architektonicznych, w przestrzeniach podwieszanych i instalacjach, gdzie ruch musi pozostać wizualnie precyzyjny, a nie widocznie ekspresyjny. Często sprawdza się, gdy koncepcja artystyczna opiera się na zdyscyplinowanej choreografii, a nie na nieregularnym ruchu.
Układy połączeń, krzywek i ruchu postępowego
Nie wszystkie instalacje kinetyczne opierają się na ruchu bezpośrednim. Wiele z nich wymaga jednego rodzaju bodźca mechanicznego, aby przełożyć go na inne widoczne zachowanie. Właśnie tutaj układy połączeń, krzywki i inne mechanizmy konwersji ruchu stają się istotne.
Systemy te są stosowane, gdy instalacja musi przekształcić energię obrotową w ruch unoszący, składający, oscylujący, otwierający, zamykający, przechylający lub falujący. Innymi słowy, ruch widoczny nie jest taki sam, jak ruch generowany przez napęd główny. Krzywka może tworzyć nieregularną sekwencję lub kontrolowany wzorzec czasowy. Połączenie może przekształcić jeden ruch obrotowy w wiele skoordynowanych przesunięć. Mechanizm dźwigniowy może wzmacniać lub łagodzić gest w zależności od pożądanego efektu wizualnego.
To potężne podejście w sztuce kinetycznej, ponieważ pozwala dziełu poruszać się w sposób, który wydaje się bardziej organiczny lub koncepcyjnie specyficzny niż zwykły obrót. Wprowadza jednak również większą złożoność mechaniczną. Każdy ruch translacyjny tworzy więcej interfejsów, więcej punktów tarcia, więcej zależności tolerancji i więcej możliwości kumulacyjnego zużycia. Utrzymanie precyzji staje się trudniejsze, ponieważ każde połączenie wpływa na całościowe zachowanie systemu.
Z tego powodu systemy oparte na sprzężeniach i krzywkach często należą do najtrudniejszych do prototypowania. Potrafią one generować piękny, ekspresyjny ruch, ale tylko wtedy, gdy ich geometria, wytrzymałość i sekwencja zostały rygorystycznie przetestowane. Ruch, który wydaje się elegancki w animacji cyfrowej, może stać się zaszumiony, niestabilny lub wizualnie niewyraźny, gdy zostanie stworzony w pełnej skali, jeśli logika translacji nie zostanie odpowiednio rozwiązana.
Tego typu systemy są często wybierane, gdy koncepcja wymaga bardziej precyzyjnego języka fizycznego — ruchu, który się rozwija, zgina, faluje lub zmienia stan, a nie tylko po prostu się obraca.
Systemy ruchu napędzane linkami i rozproszone
Systemy napędzane linkami są szczególnie istotne w instalacjach kinetycznych, gdzie ruch musi być rozłożony na wiele komponentów lub na większe pola przestrzenne. Zamiast polegać na kompaktowym, widocznym mechanizmie w każdym punkcie ruchu, systemy linowe mogą przenosić siłę na odległość, umożliwiając umieszczenie silników lub urządzeń wykonawczych z dala od widocznych elementów dzieła sztuki.
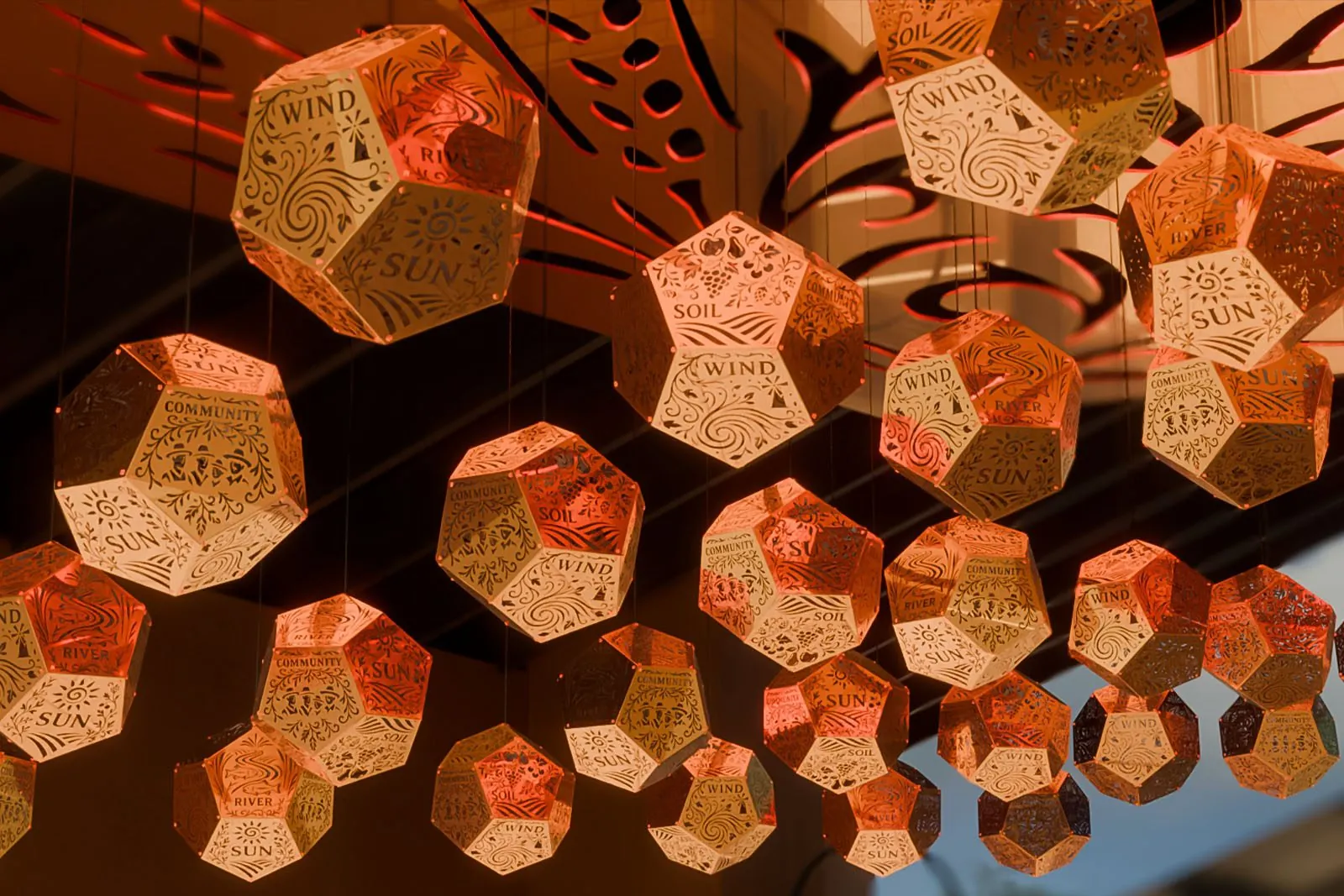
Jest to szczególnie przydatne w instalacjach podwieszanych, sufitowych polach kinetycznych oraz pracach, w których wizualna lekkość jest kluczowa. System kablowy może sprawić, że rzeźba będzie wydawała się niemal niematerialna, podczas gdy sama logika ruchu skupiona jest w ukrytych strefach podparcia, szafach sterowniczych lub peryferyjnych obszarach serwisowych. Dla architektów i projektantów stwarza to ogromną korzyść: widoczne dzieło sztuki może pozostać przestrzennie czyste, a gęstość techniczna zostaje przeniesiona w łatwiejsze do opanowania miejsca.
Jednak systemy napędzane kablami wymagają bardzo starannej kalibracji. Naprężenie, rozciągnięcie, tarcie, geometria prowadzenia kabli, wpływ środowiska i kumulacja tolerancji – wszystkie te czynniki wpływają na wydajność. W dużych instalacjach nawet niewielkie różnice w zachowaniu kabli mogą powodować nierównomierny ruch, dryft czasowy lub niespójną reakcję wizualną. Wyzwanie staje się jeszcze większe, gdy wiele ruchomych elementów musi pozostać zsynchronizowanych w systemie rozproszonym.
Te systemy są często wybierane, gdy koncepcja opiera się na zachowaniu unoszenia się, przemieszczeniu pionowym, delikatnym unoszeniu lub iluzji transformacji bez ciężaru. Są one skuteczne, ponieważ potrafią oddzielić wizualny język ruchu od pozornego położenia maszyny. Jednak ta sama niewidzialność sprawia, że dyscyplina inżynierska jest jeszcze ważniejsza. Jeśli zachowanie kabla nie zostanie starannie rozwiązane, praca może szybko stracić poczucie lekkości, od którego zależy.





Układy pneumatyczne i reagujące na płyny
Niektóre instalacje kinetyczne opierają się na logice pneumatycznej lub ruchach opartych na płynach, a nie na konwencjonalnych, sztywnych układach mechanicznych. Podejścia te są szczególnie istotne, gdy koncepcja wymaga nadmuchiwania, łagodnej deformacji, rozszerzania się pulsacyjnie, efektów oddychania lub bardziej atmosferycznych właściwości ruchu.
Systemy pneumatyczne mogą generować ruch, który zasadniczo różni się od ruchu napędzanego przekładnią lub silnikiem. Zamiast mechanicznej artykulacji, generują zmiany objętości, ciśnienia i napięcia powierzchniowego. Może to być szczególnie przydatne w środowiskach immersyjnych lub instalacjach, gdzie ruch powinien być mniej mechaniczny, a bardziej związany ze środowiskiem, ciałem lub atmosferą.
Układy reagujące na płyny, w tym w niektórych przypadkach układy hydrauliczne, mogą być również stosowane, gdy przenoszenie siły, tłumienie lub kontrolowany opór mają kluczowe znaczenie dla zachowania pracy. Układy te są jednak zazwyczaj bardziej wymagające pod względem konserwacji, uszczelnienia, zarządzania ciśnieniem, stabilności środowiskowej i niezawodności operacyjnej. Są one rzadko wybierane, chyba że specyficzne zachowanie, jakie generują, ma kluczowe znaczenie dla danej koncepcji.
W dużych instalacjach publicznych lub stałych systemy te wymagają bardzo starannego wyważenia między efektem a użytecznością. Atrakcyjne wizualnie zachowanie pneumatyczne może nie być właściwym wyborem w dłuższej perspektywie, jeśli kurz, wahania temperatury, wilgoć lub dostęp do konserwacji negatywnie wpływają na wydajność systemu. Dlatego sama obecność technicznie interesującej logiki ruchu nigdy nie wystarczy. System musi być odpowiedni nie tylko pod względem ruchu, ale także pod względem cyklu życia obiektu.
Tego typu systemy ruchu sprawdzają się najlepiej, gdy projekt wymaga łagodniejszego lub bardziej nastrojowego ruchu, którego nie da się przekonująco uzyskać za pomocą sztywnej artykulacji mechanicznej.
Systemy pasywne: wiatr, grawitacja i reakcja środowiska
Nie wszystkie instalacje kinetyczne są zasilane aktywnie. Niektóre z najbardziej fascynujących systemów ruchu są pasywne, wykorzystujące wiatr, grawitację, równowagę lub inne siły otoczenia do generowania ruchu. W tych projektach inżynieria nie koncentruje się na napędzaniu ruchu poprzez ciągłe sterowanie, lecz na projektowaniu konstrukcji zdolnej do kontrolowanej i sensownej reakcji na otoczenie.
Rzeźby reagujące na wiatr są tego wyraźnym przykładem. Instalacja może sprawiać wrażenie swobodnie animowanej przez ruch powietrza, ale w rzeczywistości zakres ruchu, zachowanie punktu obrotu, punkt równowagi, tłumienie, elastyczność materiału i podparcie konstrukcji muszą być zaprojektowane z najwyższą starannością. Bez tej precyzji reakcja otoczenia staje się albo zbyt słaba, by ją odczytać, zbyt nieregularna, by zachować czytelność, albo zbyt silna, by zapewnić długotrwałą trwałość.
Układy oparte na grawitacji mogą być równie zaawansowane. Przeciwwagi, ruch wahadłowy, układy równoważące i mechanizmy powolnego powrotu – wszystkie te mechanizmy mogą generować ruch bez stałego dopływu energii. Układy te często generują elegancki ruch o niskiej energii, ale opierają się na niezwykle zdyscyplinowanych relacjach mas i starannie kontrolowanych tolerancjach.
Systemy pasywne mają istotne zalety. Często zmniejszają zapotrzebowanie na energię, upraszczają niektóre wymagania infrastrukturalne i tworzą silniejszą zależność między pracą a warunkami na miejscu. Jednocześnie jednak zmniejszają przewidywalność. Pasywna instalacja zewnętrzna może zachowywać się doskonale w jednym paśmie pogodowym, a w innym niemal zanikać. To sprawia, że reakcja na środowisko jest zarówno atutem estetycznym, jak i wyzwaniem inżynierskim.
Systemy te odnoszą największy sukces, gdy zmienność jest częścią samej koncepcji. Jeśli dzieło sztuki opiera się na dokładnej powtarzalności, podejście pasywne może być zbyt niestabilne. Jeśli jednak intencją jest, aby dzieło reagowało na klimat, atmosferę i zmiany naturalne, ruch pasywny może stworzyć unikalną, specyficzną dla danego miejsca formę doświadczenia kinetycznego.
Systemy ruchu sterowane czujnikami i interaktywne
Instalacje interaktywne wprowadzają kolejny poziom logiki ruchu: responsywne zachowanie. W tych pracach ruch nie jest jedynie wstępnie zaprogramowany lub sterowany przez otoczenie. Reaguje na obecność, bliskość, dźwięk, ruch, dane lub inne formy danych wejściowych. To przesuwa zadanie inżynieryjne z samego generowania ruchu na jego interpretację.
Systemy oparte na czujnikach to zatem nie tylko systemy mechaniczne z interaktywną nakładką. To hybrydowe struktury łączące w sobie elementy sterowania, wykrywania, logikę sterowania, filtrowanie danych wejściowych, reguły behawioralne, warunki bezpieczeństwa, a często także koordynację mediów. Ruch to tylko jeden z elementów całego systemu. Prawdziwym wyzwaniem inżynieryjnym jest sprawienie, aby działanie systemu reagowało w sposób, który wydaje się celowy, a nie reaktywny w dosłownym sensie.
To trudniejsze, niż mogłoby się wydawać. Środowiska publiczne są nieprzewidywalne. Dane z czujników mogą być zaszumione. Użytkownicy zachowują się nieregularnie. Dane wejściowe mogą się nakładać lub wywoływać sprzeczne reakcje. Bez starannie zaprojektowanej logiki, interaktywny ruch może stać się chaotyczny, powtarzalny, chaotyczny lub wizualnie męczący. Praca może technicznie reagować, ale nie stworzyć wciągającego doświadczenia.
Najlepsze systemy interaktywne to często te, w których responsywność jest spójna. Instalacja rozpoznaje obecność, nie stając się mechanicznie podporządkowana każdemu sygnałowi. Wymaga to starannego sterowania, ponieważ system musi przełożyć surowe dane wejściowe na zachowanie, które nadal będzie artystyczne, czytelne i architektonicznie adekwatne.
Interaktywne systemy ruchu są szczególnie skuteczne w budynkach kultury, holach publicznych, instalacjach immersyjnych i środowiskach doświadczalnych, gdzie zaangażowanie użytkownika jest kluczowe. Wymagają jednak czegoś więcej niż tylko czujników. Potrzebują systemu ruchu, który reaguje inteligentnie, spójnie i niezawodnie w dłuższej perspektywie.









Zsynchronizowane systemy wieloelementowe
Wiele z najbardziej ambitnych wizualnie instalacji kinetycznych opiera się nie na pojedynczej ruchomej części, ale na rozległych układach skoordynowanych komponentów. W tych pracach system ruchu nie opiera się na jednym mechanizmie, lecz na orkiestracji w obrębie pola.
To wprowadza poważne wyzwanie inżynieryjne: synchronizację. Wiele ruchomych elementów może wymagać uruchomienia, zatrzymania, przyspieszenia, zmiany stanu lub powrotu w bardzo zdyscyplinowanej relacji względem siebie. Nawet niewielkie rozbieżności w synchronizacji lub wyrównaniu mogą osłabić ogólny efekt. To, co widz postrzega jako płynny ruch zbiorowy, może zależeć od niezwykle wymagającego systemu sekwencjonowania, kontroli, kalibracji i odporności na błędy.
Systemy te są powszechnie stosowane w podwieszanych sufitach kinetycznych, responsywnych baldachimach, instalacjach zintegrowanych z mediami i przestrzeniach rzeźbiarskich, gdzie zachowanie całości jest ważniejsze niż zachowanie pojedynczego elementu. Wyzwaniem inżynieryjnym jest nie tylko to, jak sprawić, by każda część poruszała się, ale także to, jak sprawić, by całe pole było spójne w czasie.
W praktyce często wymaga to głębszej koordynacji między mechaniką, sterowaniem, tolerancjami produkcyjnymi, procedurami instalacji i sekwencjami uruchomień niż w przypadku bardziej lokalnych systemów ruchu. Im większa instalacja, tym ważniejsze staje się zastanowienie się nad tym, jak jakość ruchu przetrwa eskalację skali. To, co działa doskonale w pięciu elementach, może stać się niestabilne lub trudne do utrzymania w stu.
To jeden z powodów, dla których strategia realizacji ma tak duże znaczenie w systemach wieloelementowych. Jeśli architektura sterowania, logika kalibracji lub dostęp do usług są słabe, instalacja może szybko utracić jakość synchronizacji, od której zależy jej efekt przestrzenny.
Systemy ruchu muszą być projektowane z myślą o konserwacji, a nie tylko wydajności
System ruchu odnosi sukces nie dlatego, że porusza się przekonująco w prototypie lub w momencie otwarcia, ale dlatego, że nadal porusza się przekonująco w czasie. To sprawia, że łatwość utrzymania jest jednym z kryteriów decydujących o wyborze systemu ruchu.
Różne systemy niosą ze sobą różne obciążenia serwisowe. Wysoce precyzyjny mechanizm napędowy może zapewniać piękny ruch, ale wymagać krótkich cykli konserwacji. System rozproszony kablowo może zachować lekkość wizualną, jednocześnie zwiększając wymagania dotyczące kalibracji. Instalacja sterowana czujnikami, reagująca na ruch, może stworzyć angażujące doświadczenie publiczne, jednocześnie zwiększając złożoność diagnostyki usterek i sterowania. System pasywny może zmniejszyć zużycie energii, jednocześnie utrudniając przewidywanie wpływu na środowisko.
Z tego powodu „najlepszy” system ruchu nigdy nie jest wybierany w sposób abstrakcyjny. Jest on wybierany w oparciu o realia lokalizacji, możliwości operacyjne klienta, środowisko, przewidywany okres eksploatacji dzieła oraz oczekiwania dotyczące wydajności zawarte w koncepcji. System idealny dla instalacji muzealnej z dedykowanym nadzorem technicznym może nie być odpowiedni dla komercyjnej przestrzeni publicznej z ograniczoną liczbą okien serwisowych. Logika ruchu, która doskonale sprawdza się wewnątrz, może okazać się niezrównoważona na zewnątrz.
W poważnym projektowaniu kinetycznym konserwacja nie jest kwestią techniczną, ale częścią samego systemu ruchu. Kwestią inżynierską jest nie tylko to, jak porusza się instalacja, ale także to, jak ten ruch jest zachowany.
Wybór odpowiedniego systemu oznacza wybór odpowiedniego rodzaju ruchu
W instalacjach kinetycznych ostatecznie liczy się nie to, czy system jest technicznie imponujący, ale to, czy generuje odpowiedni rodzaj ruchu dla danego dzieła, miejsca i zamierzonego doświadczenia. Bardziej złożony system ruchu nie jest z natury lepszy. W wielu przypadkach ograniczenie ruchu daje silniejsze rezultaty.
Właściwy system to taki, który łączy koncepcję, otoczenie, niezawodność, użyteczność i efekt przestrzenny. To on nadaje rzeźbie lub instalacji właściwy charakter behawioralny – niezależnie od tego, czy oznacza to spokojną ciągłość, inteligencję reaktywną, zmienność atmosfery, zdyscyplinowaną sekwencję, czy subtelną transformację.
Dlatego systemy ruchu są tak istotne dla sztuki kinetycznej. Nie są one ukrytym wsparciem technicznym pod artystyczną powierzchnią. Są środkami, dzięki którym dzieło myśli, porusza się i istnieje w przestrzeni.

Skontaktuj się z nami
Gotowy do stworzenia instalacji kinetycznej z odpowiednim systemem ruchu? Zapoznaj się z naszym portfolio lub skontaktuj się z zespołem SKYFORM STUDIO, aby omówić swój projekt.
W instalacjach kinetycznych ruch nie jest efektem dodatkowym, lecz podstawowym zachowaniem, które definiuje sposób odbioru dzieła w przestrzeni. Wybór systemu ruchu wpływa na precyzję, niezawodność, konserwację i ogólne wrażenia przestrzenne, co czyni go fundamentalną decyzją projektową i inżynieryjną.
W SKYFORM STUDIO projektujemy i realizujemy instalacje kinetyczne w zintegrowanym procesie, który łączy logikę ruchu, inżynierię, produkcję i wdrożenie. Dzięki temu każdy system jest nie tylko atrakcyjny wizualnie, ale także precyzyjny technicznie, trwały i dostosowany do rzeczywistych warunków.
Autor artykułu



