კინეტიკურ ინსტალაციებში მოძრაობა არასდროს არის ნეიტრალური ეფექტი. ეს არის ძირითადი ქცევა, რომლის მეშვეობითაც ნამუშევარი სივრცეში იკითხება. კინეტიკური ნამუშევარი შეიძლება მნახველისთვის ძალისხმევის გარეშე ჩანდეს, მაგრამ ამ აშკარა სიმარტივის უკან იმალება უაღრესად სპეციფიკური მოძრაობის სისტემა: ტექნიკური ჩარჩო, რომელიც განსაზღვრავს, თუ როგორ მოძრაობს ნამუშევარი, რამდენად ზუსტად ასრულებს ის, როგორ ბერდება, როგორ ინარჩუნებს მას და რამდენად დამაჯერებლად უჭერს მხარს მხატვრულ კონცეფციას.
სწორედ ამიტომ არის მოძრაობის სისტემები ასეთი მნიშვნელოვანი თანამედროვე კინეტიკურ ხელოვნებაში. ისინი უბრალოდ არ აცოცხლებენ ქანდაკებას დიზაინის დასრულების შემდეგ. ისინი თავიდანვე განსაზღვრავენ ნამუშევრის ფიზიკურ ენას. მოძრაობის ხარისხი – მშვიდი იქნება ეს თუ დრამატული, უწყვეტი თუ ეპიზოდური, რეაგირებადი თუ წინასწარ განსაზღვრული – დამოკიდებულია მის ქვეშ არსებული სისტემის ლოგიკაზე. პრაქტიკაში ეს ნიშნავს, რომ მოძრაობის სისტემა არ არის მხოლოდ მექანიკური არჩევანი. ეს არის დიზაინის გადაწყვეტილება, საინჟინრო გადაწყვეტილება და ხშირად არქიტექტურული გადაწყვეტილებაც ერთდროულად.
არქიტექტორების, დეველოპერების, მწარმოებლებისა და კინეტიკურ ინსტალაციებთან მომუშავე დიზაინის გუნდებისთვის მოძრაობის სისტემების გაგება ნიშნავს იმის გაგებას, თუ როგორ წარმოიქმნება მოძრაობა სინამდვილეში. ეს ნიშნავს იმის აღიარებას, რომ სხვადასხვა სისტემა ქმნის სხვადასხვა სივრცულ ეფექტებს, სხვადასხვა ოპერაციულ დატვირთვას და სხვადასხვა შეზღუდვებს მასშტაბზე, სიზუსტეზე, უსაფრთხოებასა და მოვლა-პატრონობაზე. ატრიუმში ჩამოკიდებული ინსტალაცია, მოედანზე ქარისადმი მგრძნობიარე ქანდაკება და საზოგადოებრივ ფოიეში ინტერაქტიული ნამუშევარი შეიძლება კინეტიკური ხელოვნების ერთსა და იმავე ოჯახს ეკუთვნოდეს, თუმცა მათ უკან მდგომი სისტემები შეიძლება რადიკალურად განსხვავებული იყოს.
SKYFORM STUDIO-სთვის ტექნიკური სიღრმე აუცილებელი ხდება. მოძრაობის სისტემის არჩევანი გავლენას ახდენს არა მხოლოდ იმაზე, თუ როგორ იქცევა ინსტალაცია გახსნის დღეს, არამედ იმაზე, რჩება თუ არა ეს ქცევა სანდო დროთა განმავლობაში. ის აყალიბებს ურთიერთობას მხატვრულ ჩანაფიქრსა და რეალურ სამყაროს შესრულებას შორის. კინეტიკურ ნამუშევარში მოძრაობა იმდენად ძლიერია, რამდენადაც ძლიერია სისტემა, რომელიც მას შესაძლებელს ხდის.


მოძრაობის სისტემები შეირჩევა ქცევით და არა მხოლოდ მექანიზმით.
კინეტიკური დიზაინის ერთ-ერთი ყველაზე გავრცელებული გაუგებრობა არის ვარაუდი, რომ მოძრაობის სისტემების შერჩევა შესაძლებელია ზოგადი გზით, თითქოს პროექტი უბრალოდ „მოტორიზებული გადაწყვეტის“ ან „კინეტიკურ მექანიზმის“ გამოყენებას მოითხოვს. სინამდვილეში, სისტემა შეირჩევა იმ ქცევის მიხედვით, რომლის მიღწევაც ინსტალაციას სჭირდება.
პირველი საინჟინრო კითხვა არ არის, თუ რა აპარატურა იქნება გამოყენებული. საქმე იმაშია, თუ რა სახის მოძრაობას მოითხოვს სინამდვილეში სამუშაო. საჭიროებს თუ არა ინსტალაცია უწყვეტ მოძრაობას თუ პერიოდულ გააქტიურებას? მოძრაობა სინქრონიზებულია მრავალ კომპონენტში თუ ლოკალიზებულია ერთ ელემენტზე? უნდა იყოს ის გლუვი და ჩუმი, თვალსაჩინოდ მექანიკური, გარემოზე რეაქტიული თუ რეაგირებადი ყოფნასა და მონაცემებზე? სიზუსტე უფრო მნიშვნელოვანია, ვიდრე ამპლიტუდა? მოძრაობა უნდა იქნას აღქმული, როგორც ბუნებრივი, დაპროგრამებული, არქიტექტურული თუ შესრულებითი?
ეს გადაწყვეტილებები მოძრაობის სისტემას კონკრეტული კომპონენტების შერჩევამდე დიდი ხნით ადრე განსაზღვრავს. დახვეწილ კოლექტიურ ტალღაზე დაფუძნებულ ნამუშევარს განსხვავებული სისტემური ლოგიკა დასჭირდება, ვიდრე ნელ ბრუნვაზე, მოძრავ ტილოზე ან რეაგირებად ჩამოკიდებულ ველზე დაფუძნებულ ქანდაკებას. ზოგიერთი სისტემა შესაფერისია სიზუსტისა და განმეორებადობისთვის. სხვები უკეთესია, როდესაც კონცეფცია დამოკიდებულია ცვალებადობაზე ან გარემოს პასიურ რეაქციაზე. სწორედ ამიტომ, მოძრაობის სისტემები არ შეიძლება ჩაითვალოს ურთიერთშემცვლელ ტექნიკურ პაკეტებად. ისინი ნამუშევრის კონცეპტუალური საფუძვლის ნაწილია.
ყველაზე ძლიერი კინეტიკური ინსტალაციები ის ინსტალაციებია, რომლებშიც მოძრაობის სისტემა და მხატვრული ჩანაფიქრი განუყოფელია. მნახველმა შეიძლება ვერასდროს დაინახოს სისტემის სრული ტექნიკური სირთულე, მაგრამ ის მის შედეგებს თავად მოძრაობის ხარისხში გრძნობს.
პირდაპირი წამყვანი სისტემები და კონტროლირებადი ბრუნვითი მოძრაობა
პირდაპირი ამძრავის სისტემები კინეტიკურ ინსტალაციებში მოძრაობის ლოგიკის ერთ-ერთი ყველაზე ნათელი მაგალითია. ამ სისტემებში მოძრაობა პირდაპირ ძრავიდან მოძრავ ელემენტზე გადადის მრავალი შუალედური გადატანის გარეშე. ამან შეიძლება შექმნას გლუვი, მაღალკონტროლირებადი მოძრაობა და განსაკუთრებით სასარგებლოა იქ, სადაც ნამუშევარი დამოკიდებულია სიზუსტეზე, განმეორებადობასა და სტაბილურ თანმიმდევრობაზე.
პირდაპირი ამძრავის მოძრაობა ხშირად ასოცირდება ბრუნვით ქცევასთან: დისკები, რგოლები, პანელები, პირები, მკლავები და ჩამოკიდებული ელემენტები, რომლებიც ბრუნავენ ფიქსირებულ ღერძზე ან მკაცრად განსაზღვრულ დიაპაზონში. ამ მიდგომის მთავარი უპირატესობა სიცხადეა. რადგან სისტემის გზა შედარებით პირდაპირია, მოძრაობის დაკალიბრება უფრო ადვილია და საერთო ქცევა დროთა განმავლობაში შეიძლება უფრო პროგნოზირებადი დარჩეს. იმ ინსტალაციებში, სადაც ჩუმი მუშაობა და სუფთა სინქრონიზაცია მნიშვნელოვანია, ეს კონტროლი განსაკუთრებით ღირებულია.
თუმცა, პირდაპირი ამძრავი ავტომატურად არ ნიშნავს სიმარტივეს. უფრო დიდ მასშტაბებზე, ბრუნვითი ელემენტები მნიშვნელოვან სტრუქტურულ და მექანიკურ შედეგებს წარმოქმნიან. ნელმა მოძრაობამაც კი შეიძლება გამოიწვიოს ინერციული დატვირთვები, ბრუნვითი სტრესი და ხანგრძლივი ცვეთა საკისრებზე, ლილვებსა და საყრდენ შეერთებებზე. როდესაც მოძრაობა ნაწილდება მრავალ ელემენტზე, კალიბრაცია უფრო მოთხოვნადი ხდება. რაც უფრო გლუვი ჩანს მონტაჟი, მით უფრო დისციპლინირებული უნდა იყოს გასწორებისა და ტოლერანტობის სტრატეგია.
ამ ტიპის სისტემა განსაკუთრებით სასარგებლოა არქიტექტურულ ინტერიერებში, დაკიდულ ველებსა და ინსტალაციებში, სადაც მოძრაობა ვიზუალურად ზუსტი უნდა დარჩეს და არა თვალსაჩინოდ გამოხატული. ის ხშირად კარგად მუშაობს, როდესაც მხატვრული კონცეფცია არარეგულარული მოძრაობის ნაცვლად დისციპლინირებულ ქორეოგრაფიაზეა დამოკიდებული.
შეერთების, კამერის და გადატანილი მოძრაობის სისტემები
ყველა კინეტიკური ინსტალაცია პირდაპირ მოძრაობაზე არ არის დამოკიდებული. ბევრ მათგანს ერთი სახის მექანიკური შეყვანის სიგნალი სჭირდება, რათა განსხვავებულ ხილულ ქცევად გარდაიქმნას. სწორედ აქ ხდება მნიშვნელოვანი შეერთების სისტემები, კამერები და მოძრაობის გარდაქმნის სხვა მექანიზმები.
ეს სისტემები გამოიყენება მაშინ, როდესაც ინსტალაციას სჭირდება ბრუნვის ენერგიის გარდაქმნა აწევის, დაკეცვის, რხევის, გაღების, დახურვის, დახრის ან ტალღის მსგავს მოძრაობად. სხვა სიტყვებით რომ ვთქვათ, ხილული მოძრაობა არ არის იგივე, რაც ძირითადი ამძრავის მიერ გენერირებული მოძრაობა. კამერამ შეიძლება შექმნას არარეგულარული თანმიმდევრობა ან კონტროლირებადი დროის ნიმუში. შეერთებამ შეიძლება ერთი ბრუნვითი მოძრაობა მრავალ კოორდინირებულ ცვლად გარდაქმნას. ბერკეტზე დაფუძნებულმა მექანიზმმა შეიძლება გააძლიეროს ან მოდერაცია გაუწიოს ჟესტს სასურველი ვიზუალური ეფექტის მიხედვით.
ეს კინეტიკურ ხელოვნებაში ძლიერი მიდგომაა, რადგან ის საშუალებას აძლევს ნამუშევარს იმოძრაოს უფრო ორგანული ან კონცეპტუალურად სპეციფიკური გზებით, ვიდრე მარტივი ბრუნვა. თუმცა, ის ასევე შემოაქვს უფრო დიდი მექანიკური სირთულე. ყოველი გადატანილი მოძრაობა ქმნის მეტ ინტერფეისს, მეტ ხახუნის წერტილს, მეტ დამოკიდებულებას ტოლერანტობაზე და კუმულაციური ცვეთის მეტ შესაძლებლობას. სიზუსტის შენარჩუნება უფრო რთული ხდება, რადგან თითოეული კავშირი გავლენას ახდენს სისტემის მთლიან ქცევაზე.
ამ მიზეზით, ბმულებზე და კამერაზე დაფუძნებული სისტემები ხშირად პროტოტიპების შექმნის ყველაზე მომთხოვნ სისტემებს შორისაა. მათ შეუძლიათ შექმნან ულამაზესი, ექსპრესიული მოძრაობა, მაგრამ მხოლოდ მაშინ, როდესაც მათი გეომეტრია, წინააღმდეგობა და თანმიმდევრობა მკაცრად არის შემოწმებული. მოძრაობა, რომელიც ელეგანტურად გამოიყურება ციფრულ ანიმაციაში, შეიძლება გახდეს ხმაურიანი, არასტაბილური ან ვიზუალურად გაუგებარი სრული მასშტაბით აწყობისას, თუ თარგმანის ლოგიკა სათანადოდ არ არის გადაწყვეტილი.
ამ სისტემებს ხშირად მაშინ ირჩევენ, როდესაც კონცეფცია უფრო მკაფიო ფიზიკურ ენას მოითხოვს — მოძრაობა, რომელიც უბრალოდ ბრუნვის ნაცვლად იშლება, იხრება, ტალღდება ან იცვლის მდგომარეობას.
საკაბელო და განაწილებული მოძრაობის სისტემები
კაბელზე მომუშავე სისტემები განსაკუთრებით აქტუალურია კინეტიკურ ინსტალაციებში, სადაც მოძრაობა უნდა გადანაწილდეს მრავალ კომპონენტზე ან უფრო დიდ სივრცულ ველებზე. თითოეულ მოძრავ წერტილში კომპაქტურ ხილულ მექანიზმზე დაყრდნობის ნაცვლად, კაბელურ სისტემებს შეუძლიათ ძალის გადაცემა მანძილზე, რაც საშუალებას აძლევს ძრავებს ან ამძრავ მოწყობილობას განლაგდეს ხელოვნების ნიმუშის ხილული ელემენტებისგან მოშორებით.
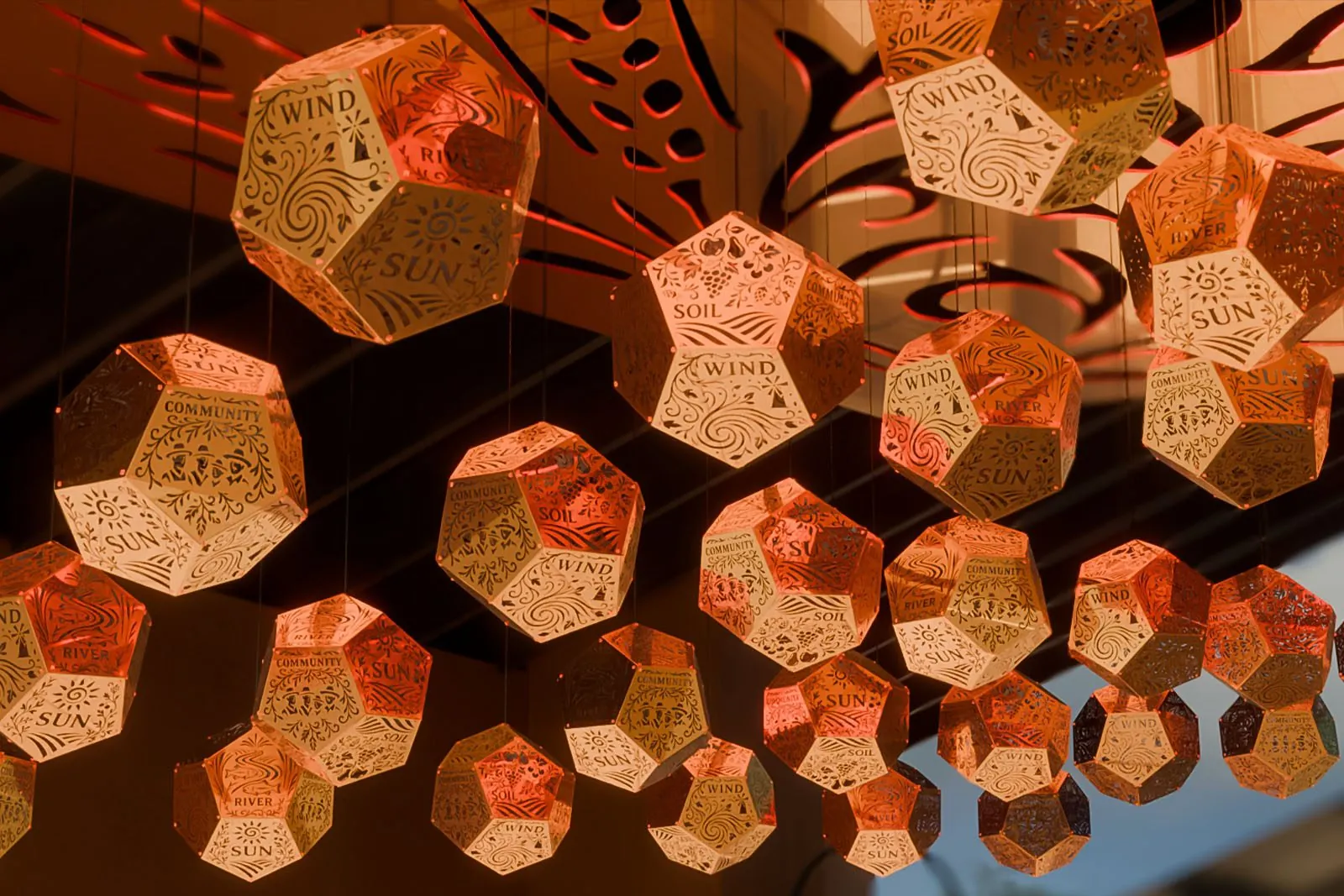
ეს განსაკუთრებით სასარგებლოა დაკიდულ ინსტალაციებში, ჭერზე დაფუძნებულ კინეტიკურ ველებსა და იმ სამუშაოებში, სადაც ვიზუალური სიმსუბუქე აუცილებელია. საკაბელო სისტემას შეუძლია ქანდაკება თითქმის უმნიშვნელოდ გამოიყურებოდეს, მაშინ როდესაც რეალური მოძრაობის ლოგიკა კონცენტრირებულია დაფარულ საყრდენ ზონებში, მართვის კარადებში ან პერიფერიულ მომსახურების ადგილებში. არქიტექტორებისა და დიზაინერებისთვის ეს დიდ უპირატესობას ქმნის: ხილული ხელოვნების ნიმუში შეიძლება დარჩეს სივრცით სუფთა, ხოლო ტექნიკური სიმკვრივე გადაადგილდეს მართვად ადგილებში.
თუმცა, კაბელზე მომუშავე სისტემები ძალიან ფრთხილად კალიბრაციას მოითხოვს. დაჭიმულობა, გაჭიმვა, ხახუნი, მარშრუტიზაციის გეომეტრია, გარემოზე ზემოქმედება და კუმულაციური ტოლერანტობა გავლენას ახდენს მუშაობაზე. დიდ ინსტალაციაში, კაბელის ქცევაში მცირედი განსხვავებებიც კი შეიძლება გამოიწვიოს არათანაბარი მოძრაობა, დროის რხევა ან არათანმიმდევრული ვიზუალური რეაქცია. გამოწვევა კიდევ უფრო დიდი ხდება, როდესაც განაწილებულ სისტემაში ბევრი მოძრავი ელემენტი სინქრონიზებული უნდა იყოს.
ეს სისტემები ხშირად მაშინ ირჩევა, როდესაც კონცეფცია დამოკიდებულია მცურავ ქცევაზე, ვერტიკალურ გადაადგილებაზე, ნაზ აწევაზე ან უწონო ტრანსფორმაციის ილუზიაზე. ისინი მძლავრია, რადგან მათ შეუძლიათ მოძრაობის ვიზუალური ენის გამიჯვნა მანქანის აშკარა მდებარეობისგან. თუმცა, იგივე უხილავობა საინჟინრო დისციპლინას კიდევ უფრო მნიშვნელოვანს ხდის. თუ კაბელის ქცევა ფრთხილად არ არის გადაწყვეტილი, სამუშაომ შეიძლება სწრაფად დაკარგოს ძალისხმევის სიმარტივის შეგრძნება, რომელზეც ის დამოკიდებულია.





პნევმატური და სითხეზე რეაგირებადი სისტემები
ზოგიერთი კინეტიკური ინსტალაცია ტრადიციული ხისტი მექანიკური სისტემების ნაცვლად პნევმატურ ლოგიკას ან სითხეზე დაფუძნებულ მოძრაობის ქცევას ეყრდნობა. ეს მიდგომები განსაკუთრებით აქტუალურია, როდესაც კონცეფცია მოითხოვს გაბერვას, რბილ დეფორმაციას, პულსის მსგავს გაფართოებას, სუნთქვის ეფექტებს ან ატმოსფერული მოძრაობის უფრო მეტ თვისებებს.
პნევმატურ სისტემებს შეუძლიათ შექმნან მოძრაობა, რომელიც ფუნდამენტურად განსხვავდება გადაცემათა კოლოფით ან ძრავით ბრუნვადი ქცევისგან. მექანიკური არტიკულაციის ნაცვლად, ისინი ქმნიან მოცულობის, წნევის და ზედაპირული დაჭიმულობის ცვლილებებს. ეს განსაკუთრებით სასარგებლო შეიძლება იყოს ინტერაქტიულ გარემოში ან ინსტალაციებში, სადაც მოძრაობა ნაკლებად უნდა იყოს მანქანასთან დაკავშირებული და უფრო გარემოსდაცვითი, ფიზიკური ან ატმოსფერული უნდა იყოს.
სითხეზე რეაგირებადი სისტემები, ზოგიერთ შემთხვევაში ჰიდრავლიკური ლოგიკის ჩათვლით, ასევე შეიძლება გამოყენებულ იქნას, როდესაც ძალის გადაცემა, დემპფერაცია ან კონტროლირებადი წინააღმდეგობა სამუშაოს ქცევისთვის ცენტრალურ როლს თამაშობს. თუმცა, ეს სისტემები, როგორც წესი, უფრო მომთხოვნია მოვლა-პატრონობის, დალუქვის, წნევის მართვის, გარემოს სტაბილურობისა და ექსპლუატაციის საიმედოობის თვალსაზრისით. ისინი იშვიათად ირჩევიან, თუ მათ მიერ შექმნილი კონკრეტული ქცევა არ არის აუცილებელი კონცეფციისთვის.
მასშტაბური საჯარო ან მუდმივი დანადგარებისთვის, ამ სისტემებს ძალიან ფრთხილად სჭირდებათ ბალანსი ეფექტსა და მომსახურების შესაძლებლობას შორის. ვიზუალურად მიმზიდველი პნევმატური ქცევა შეიძლება არ იყოს სწორი არჩევანი გრძელვადიანი პერსპექტივაში, თუ გარემოს მტვერი, ტემპერატურის რყევა, ტენიანობა ან ტექნიკური მომსახურების ხელმისაწვდომობა საფრთხეს უქმნის სისტემის მუშაობას. სწორედ ამიტომ, მხოლოდ ტექნიკურად საინტერესო მოძრაობის ლოგიკის არსებობა არასდროს არის საკმარისი. სისტემა უნდა იყოს შესაბამისი არა მხოლოდ მოძრაობისთვის, არამედ სამუშაოს სასიცოცხლო ციკლისთვისაც.
ეს მოძრაობის სისტემები ხშირად ყველაზე წარმატებულია, როდესაც პროექტს სჭირდება უფრო რბილი ან ატმოსფერული მოძრაობა, რომლის დამაჯერებლად მიღწევა ხისტი მექანიკური არტიკულაციით შეუძლებელია.
პასიური სისტემები: ქარი, გრავიტაცია და გარემოზე რეაგირება
ყველა კინეტიკური ინსტალაცია არ მუშაობს აქტიურად. ზოგიერთი ყველაზე მიმზიდველი მოძრაობის სისტემა პასიურია და მოძრაობის გენერირებისთვის ქარს, გრავიტაციას, ბალანსს ან სხვა გარემო ძალებს ეყრდნობა. ამ ნაშრომებში ინჟინერია არ არის ორიენტირებული მოძრაობის უწყვეტი აქტივაციის გზით წარმართვაზე, არამედ ისეთი სტრუქტურის შექმნაზე, რომელსაც შეუძლია გარემოზე კონტროლირებადი და შინაარსიანი რეაგირება.
ქარის მიმართ მგრძნობიარე ქანდაკებები ამის ნათელი მაგალითია. ინსტალაცია შეიძლება თავისუფლად ჩანდეს ჰაერის მოძრაობით გაცოცხლებული, მაგრამ სინამდვილეში მოძრაობის დიაპაზონი, ბრუნვის ქცევა, ბალანსის წერტილი, დემპფერაცია, მასალის მოქნილობა და სტრუქტურული საყრდენი – ყველაფერი ეს ძალიან ფრთხილად უნდა იყოს დაპროექტებული. ამ სიზუსტის გარეშე, გარემოზე ზემოქმედება ან ძალიან სუსტი ხდება წასაკითხად, ან ძალიან არასტაბილური, რომ წასაკითხად დარჩეს, ან ძალიან ძლიერია ხანგრძლივი გამძლეობისთვის.
გრავიტაციაზე დაფუძნებული სისტემები შეიძლება ისეთივე დახვეწილი იყოს. საპირწონეებს, გულსაკიდის მოძრაობას, ხელახლა დაბალანსების სისტემებს და ნელი დაბრუნების მექანიზმებს შეუძლიათ მოძრაობის შექმნა მუდმივი ენერგიის მიწოდების გარეშე. ეს სისტემები ხშირად წარმოქმნიან ელეგანტურ, დაბალი ენერგიის მოძრაობას, მაგრამ ისინი დამოკიდებულია უკიდურესად დისციპლინირებულ მასობრივ ურთიერთობებსა და ფრთხილად კონტროლირებად ტოლერანტობაზე.
პასიურ სისტემებს მნიშვნელოვანი უპირატესობები აქვთ. ისინი ხშირად ამცირებენ ენერგიის მოთხოვნას, ამარტივებენ გარკვეული ინფრასტრუქტურის მოთხოვნებს და ქმნიან უფრო მყარ კავშირს სამუშაოებსა და მისი ადგილმდებარეობის პირობებს შორის. თუმცა, ისინი ასევე იწვევენ ნაკლებ პროგნოზირებადობას. პასიური გარე ინსტალაცია შეიძლება შესანიშნავად მუშაობდეს ერთ ამინდის დიაპაზონში და თითქმის გაქრეს მეორეში. ეს გარემოზე რეაგირებას როგორც ესთეტიკურ აქტივად, ასევე საინჟინრო გამოწვევად აქცევს.
ეს სისტემები ყველაზე წარმატებულია, როდესაც ცვალებადობა თავად კონცეფციის ნაწილია. თუ ნამუშევარი ზუსტ განმეორებადობაზეა დამოკიდებული, პასიური მიდგომა შეიძლება ძალიან არასტაბილური იყოს. თუმცა, თუ მიზანია, რომ ნამუშევარი კლიმატზე, ატმოსფეროსა და ბუნებრივ ცვლილებებზე რეაგირებდეს, პასიურ მოძრაობას შეუძლია შექმნას კინეტიკური გამოცდილების უნიკალური, ადგილისთვის სპეციფიკური ფორმა.
სენსორებით მართული და ინტერაქტიული მოძრაობის სისტემები
ინტერაქტიული ინსტალაციები მოძრაობის ლოგიკის კიდევ ერთ ფენას შემოაქვს: რეაგირებად ქცევას. ამ ნამუშევრებში მოძრაობა არ არის უბრალოდ წინასწარ დაპროგრამებული ან გარემოთი განპირობებული. ის რეაგირებს ყოფნაზე, სიახლოვეზე, ხმაზე, მოძრაობაზე, მონაცემებზე ან შეყვანის სხვა ფორმებზე. ეს საინჟინრო ამოცანას მხოლოდ მოძრაობის გენერირებისგან მოძრაობის ინტერპრეტაციაზე გადააქვს.
სენსორებით მართული სისტემები, შესაბამისად, არ არის მხოლოდ მექანიკური სისტემები ინტერაქტიული გადაფარვით. ისინი წარმოადგენენ ჰიბრიდულ ჩარჩოებს, რომლებიც აერთიანებენ აქტივაციას, სენსორულ სისტემებს, მართვის ლოგიკას, შეყვანის ფილტრაციას, ქცევით წესებს, უსაფრთხოების პირობებს და ხშირად მედიის კოორდინაციას. მოძრაობა მთლიანი სისტემის მხოლოდ ერთი ნაწილია. რეალური საინჟინრო გამოწვევა მდგომარეობს იმაში, რომ სამუშაომ რეაგირება მოახდინოს ისე, რომ შეგნებულად იგრძნობოდეს და არა რეაქტიულად, უხეში ან პირდაპირი გაგებით.
ეს უფრო რთულია, ვიდრე შეიძლება ჩანდეს. საჯარო გარემო არაპროგნოზირებადია. სენსორული მონაცემები შეიძლება ხმაურიანი იყოს. მომხმარებლები არარეგულარულად იქცევიან. შეყვანილი მონაცემები შეიძლება გადაფაროს ან გამოიწვიოს წინააღმდეგობრივი რეაქციები. ყურადღებით შემუშავებული ლოგიკის გარეშე, ინტერაქტიული მოძრაობა შეიძლება გახდეს ნახტომიანი, განმეორებადი, ქაოტური ან ვიზუალურად დამღლელი. სამუშაო შეიძლება ტექნიკურად რეაგირებდეს, მაგრამ ვერ შექმნას მიმზიდველი გამოცდილება.
საუკეთესო ინტერაქტიული სისტემები ხშირად ისეთებია, რომლებშიც რეაგირება თავშეკავებულად იგრძნობა. ინსტალაცია აღიარებს არსებობას ყველა სიგნალის მექანიკურად დაქვემდებარების გარეშე. ეს მოითხოვს ფრთხილად კონტროლის ინჟინერიას, რადგან სისტემამ ნედლი შეყვანა უნდა გარდაქმნას ქცევად, რომელიც მაინც მხატვრულად, წასაკითხად და არქიტექტურულად შესაბამისად გამოიყურება.
ინტერაქტიული მოძრაობის სისტემები განსაკუთრებით ეფექტურია კულტურულ შენობებში, საზოგადოებრივ ლობიებში, ინტერაქტიულ ინსტალაციებსა და გამოცდილებით აღსავსე გარემოში, სადაც მომხმარებლის ჩართულობა კონცეფციის ცენტრშია. თუმცა, ისინი მხოლოდ სენსორებზე მეტს მოითხოვენ. მათ სჭირდებათ მოძრაობის სისტემა, რომელსაც შეუძლია ინტელექტით, თანმიმდევრულობითა და გრძელვადიანი საიმედოობით რეაგირება.









სინქრონიზებული მრავალელემენტიანი სისტემები
ვიზუალურად ყველაზე ამბიციური კინეტიკური ინსტალაციების უმეტესობა არა ერთ მოძრავ ნაწილზე, არამედ კოორდინირებული კომპონენტების დიდ მასივზეა დამოკიდებული. ამ ნამუშევრებში მოძრაობის სისტემა ერთ მექანიზმს არ ეხება. ეს ველზე ორკესტრირებას ეხება.
ეს ინჟინერიის წინაშე მნიშვნელოვან გამოწვევას წარმოადგენს: სინქრონიზაცია. შესაძლოა, მრავალ მოძრავ ელემენტს ერთმანეთთან მაღალი დისციპლინირებული ურთიერთობით დაწყება, პაუზა, აჩქარება, მდგომარეობის შეცვლა ან დაბრუნება დასჭირდეს. დროის ან გასწორების ძალიან მცირე შეუსაბამობამაც კი შეიძლება საერთო ეფექტი შეასუსტოს. ის, რაც მნახველის მიერ ფლუიდურ კოლექტიურ მოძრაობად აღიქმება, შეიძლება დამოკიდებული იყოს თანმიმდევრობის, კონტროლის, კალიბრაციისა და ხარვეზებისადმი ტოლერანტობის უკიდურესად მომთხოვნ სისტემაზე.
ეს სისტემები ხშირია დაკიდულ კინეტიკურ ჭერებში, რეაგირებად ტილოებში, მედია-ინტეგრირებულ ინსტალაციებსა და სკულპტურულ ველებში, სადაც მთლიანის ქცევა უფრო მნიშვნელოვანია, ვიდრე ნებისმიერი ცალკეული ელემენტის. საინჟინრო გამოწვევა არა მხოლოდ თითოეული ნაწილის მოძრაობაშია, არამედ მთელი ველის დროთა განმავლობაში თანმიმდევრულად წაკითხვაშიც.
პრაქტიკაში, ეს ხშირად მოითხოვს უფრო ღრმა კოორდინაციას მექანიკას, კონტროლს, დამზადების ტოლერანტობას, ინსტალაციის პროცედურებსა და ექსპლუატაციაში გაშვების თანმიმდევრობას შორის, ვიდრე უფრო ლოკალიზებული მოძრაობის სისტემები. რაც უფრო დიდია ინსტალაცია, მით უფრო მნიშვნელოვანი ხდება იმაზე ფიქრი, თუ როგორ უძლებს მოძრაობის ხარისხი მასშტაბის ესკალაციას. ის, რაც შესანიშნავად მუშაობს ხუთ ელემენტზე, შეიძლება არასტაბილური ან ასზე რთული შესანარჩუნებელი გახდეს.
ეს არის ერთ-ერთი მიზეზი, რის გამოც რეალიზაციის სტრატეგია ასე მნიშვნელოვანია მრავალელემენტიან სისტემებში. თუ მართვის არქიტექტურა, კალიბრაციის ლოგიკა ან სერვისზე წვდომა სუსტია, ინსტალაციამ შეიძლება სწრაფად დაკარგოს სინქრონიზებული ხარისხი, რომელზეც მისი სივრცითი ეფექტია დამოკიდებული.
მოძრაობის სისტემები უნდა იყოს შექმნილი მოვლა-პატრონობისთვის და არა მხოლოდ მუშაობისთვის.
მოძრაობის სისტემა წარმატებულია არა იმიტომ, რომ ის დამაჯერებლად მოძრაობს პროტოტიპში ან გახსნისას, არამედ იმიტომ, რომ ის დამაჯერებლად აგრძელებს მოძრაობას დროთა განმავლობაში. ეს შენარჩუნებადობას მოძრაობის სისტემის შერჩევის ერთ-ერთ განმსაზღვრელ კრიტერიუმად აქცევს.
სხვადასხვა სისტემას განსხვავებული მომსახურების დატვირთვა აქვს. მაღალი სიზუსტის მქონე მექანიზმმა შეიძლება უზრუნველყოს ლამაზი მოძრაობა, მაგრამ მოითხოვოს მკაცრი მოვლა-პატრონობის ციკლები. კაბელებით განაწილებულმა სისტემამ შეიძლება შეინარჩუნოს ვიზუალური სიმსუბუქე და ამავდროულად გაზარდოს კალიბრაციის მოთხოვნები. სენსორზე მართულმა რეაგირებადმა ინსტალაციამ შეიძლება შექმნას მიმზიდველი საზოგადოებრივი გამოცდილება და ამავდროულად გაზარდოს სირთულეები ხარვეზების დიაგნოსტიკასა და კონტროლის ქცევაში. პასიურმა სისტემამ შეიძლება შეამციროს ენერგიის მოხმარება და ამავდროულად გაართულოს გარემოსდაცვითი მაჩვენებლების პროგნოზირება.
ამ მიზეზით, „საუკეთესო“ მოძრაობის სისტემა არასდროს შეირჩევა აბსტრაქციულად. ის შეირჩევა ტერიტორიის რეალობის, კლიენტის ოპერაციული შესაძლებლობების, გარემოს, სამუშაოს სავარაუდო სიცოცხლის ხანგრძლივობისა და კონცეფციაში ჩადებული შესრულების მოლოდინების გათვალისწინებით. სისტემა, რომელიც იდეალურია მუზეუმის ინსტალაციისთვის სპეციალური ტექნიკური ზედამხედველობით, შეიძლება არ იყოს შესაფერისი კომერციული საჯარო სივრცისთვის შეზღუდული მომსახურების ფანჯრებით. მოძრაობის ლოგიკა, რომელიც შესანიშნავად მუშაობს შენობაში, შეიძლება არამდგრადი გახდეს გარეთ.
სერიოზულ კინეტიკურ დიზაინში, მოვლა-პატრონობა არ არის ტექნიკური საკითხი. ის თავად მოძრაობის სისტემის ნაწილია. საინჟინრო საკითხი არა მხოლოდ იმაში მდგომარეობს, თუ როგორ მოძრაობს ინსტალაცია, არამედ იმაშიც, თუ როგორ ინარჩუნებს ეს მოძრაობა.
სწორი სისტემის არჩევა ნიშნავს მოძრაობის სწორი ტიპის არჩევას.
კინეტიკური ინსტალაციებში საბოლოო ჯამში მნიშვნელოვანი არ არის ის, ტექნიკურად შთამბეჭდავია თუ არა სისტემა, არამედ ის, ქმნის თუ არა ის სამუშაოსთვის, ადგილისთვის და სასურველი გამოცდილებისთვის შესაფერის მოძრაობას. უფრო რთული მოძრაობის სისტემა თავისთავად უკეთესი არ არის. ბევრ შემთხვევაში, შეზღუდვა უფრო ძლიერ შედეგებს იძლევა.
შესაბამისი სისტემა არის ის, რომელიც აერთიანებს კონცეფციას, გარემოს, საიმედოობას, მომსახურებასა და სივრცულ ეფექტს. ეს არის ის, რაც ქანდაკებას ან ინსტალაციას სწორ ქცევით ხასიათს ანიჭებს — იქნება ეს მშვიდი უწყვეტობა, რეაქტიული ინტელექტი, ატმოსფერული ცვალებადობა, დისციპლინირებული თანმიმდევრობა თუ დახვეწილი ტრანსფორმაცია.
სწორედ ამიტომ არის მოძრაობის სისტემები ასეთი ცენტრალური კინეტიკური ხელოვნებისთვის . ისინი არ წარმოადგენენ მხატვრული ზედაპირის ქვეშ დაფარულ ტექნიკურ საყრდენს. ისინი წარმოადგენენ საშუალებებს, რომელთა მეშვეობითაც ნამუშევარი ფიქრობს, მოძრაობს და არსებობს სივრცეში.

დაგვიკავშირდით
მზად ხართ კინეტიკური ინსტალაციის შესაქმნელად შესაბამისი მოძრაობის სისტემით? გაეცანით ჩვენს პორტფოლიოს ან დაუკავშირდით SKYFORM STUDIO-ს გუნდს თქვენი პროექტის განსახილველად.
კინეტიკურ ინსტალაციებში მოძრაობა არ არის დამატებითი ეფექტი – ეს არის ძირითადი ქცევა, რომელიც განსაზღვრავს, თუ როგორ აღიქმება ნამუშევარი სივრცეში. მოძრაობის სისტემის არჩევანი განსაზღვრავს სიზუსტეს, საიმედოობას, მოვლა-პატრონობას და საერთო სივრცულ გამოცდილებას, რაც მას დიზაინისა და ინჟინერიის ფუნდამენტურ გადაწყვეტილებად აქცევს.
SKYFORM STUDIO- ში ჩვენ ვქმნით და ვახორციელებთ კინეტიკურ ინსტალაციებს ინტეგრირებული პროცესის მეშვეობით, რომელიც აკავშირებს მოძრაობის ლოგიკას, ინჟინერიას, დამზადებას და განხორციელებას. ეს უზრუნველყოფს, რომ თითოეული სისტემა იყოს არა მხოლოდ ვიზუალურად მიმზიდველი, არამედ ტექნიკურად ზუსტი, გამძლე და რეალურ პირობებთან თავსებადი.
სტატიის ავტორი



